Standard Linear Stages (1, 2 and 3 axis)
")
Five-Phase Stepper Motors vs. Two-Phase
Two-phase motors are far more ubiquitous and have many more controller options while still providing similar performance to five-phase motors. Five-phase stepper motors are not as common but offer better resolution, lower vibration, and higher acceleration/deceleration rates (due to smaller step angles) and are less likely to lose synchronization due to overshooting/undershooting compared to a two-phase stepper motor. For applications requiring high precision, low noise, and low vibration, five-phase is the preferred technology.
Resolution
|
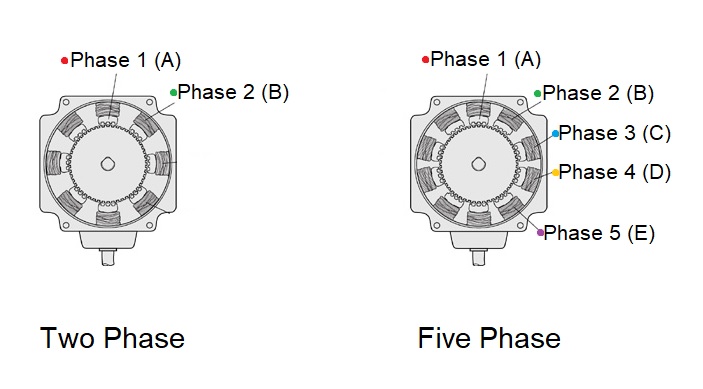 |
The five-phase stepper motor, physically, is not much different from the two-phase motor. Both have 50 teeth. The difference is that because the five-phase motor has 10 poles, it only has to move 1/10 of a tooth pitch to line up with the next phase. However, with the two-phase motor, the rotor has to move 1/4 of a tooth pitch to line up with the next phase. This results in the two-phase having 200 steps per rotation, 1.8° per step, while the five-phase has 500 steps per rotation, 0.72° per step. A smaller rotation angle means better resolution.
|
|
Vibration
|
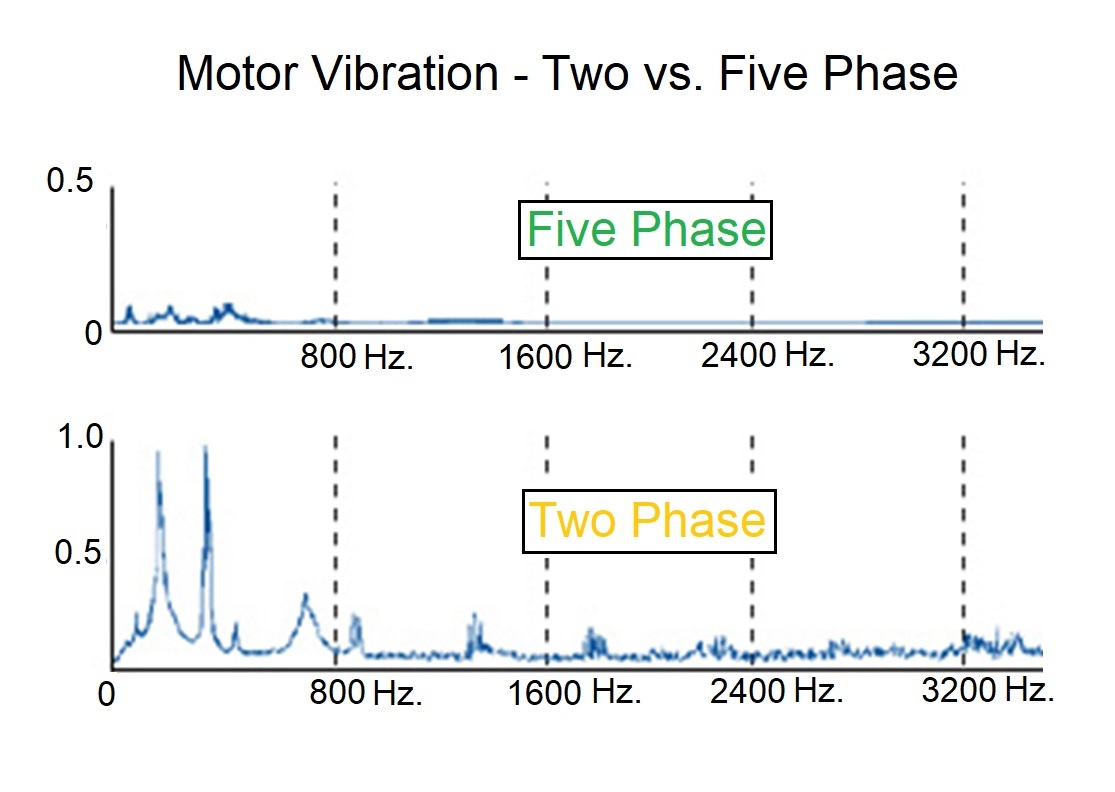 |
The smaller step angles in five-phase stepper motors versus a two-phase motor limit the vibration so that it is much less than in a two-phase. The graph shows the vibration generated from a five-phase motor compared to that of a two-phase stepper motor. As you can see the two-phase motor produces much more vibration, almost an order of magnitude more. Additionally, the vibration magnitude peaks around 200 Hz and 400 Hz. This is especially important when trying to limit vibrations on an optical table mainly because this is where many optical tables experience resonance peaks.
|
|
Usable Torque
|
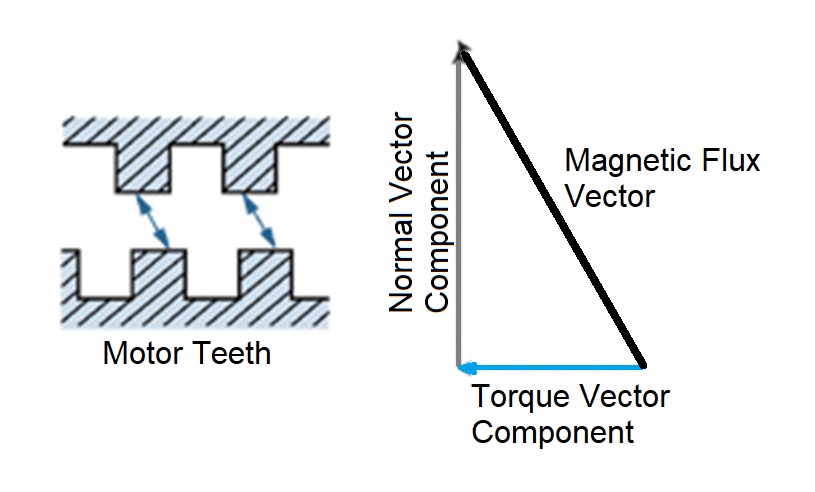 |
When the stator is energized it creates an electromagnet that attracts the magnetic flux of the rotor. The magnetic flux vector can be broken into two component vectors: one normal and one tangential (torque vector). The normal component vector contributes nothing to rotating the motor because it runs radially through the center of the motor’s axis of rotation. Torque is only produced when the tangential component is present. The presence of tangential flux is depicted in the illustration below. When half-stepping or micro-stepping a five-phase stepper motor actually increases torque by up to 10% because there are more phases being energized. A two-phase motor will lose torque by up to 40% when half-stepping or micro-stepping.
|